


|
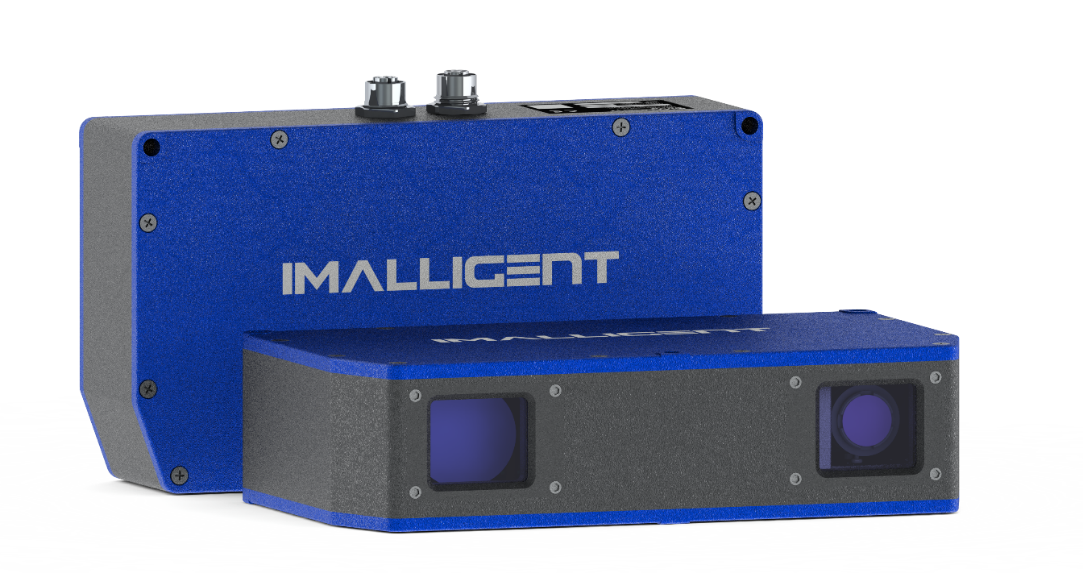
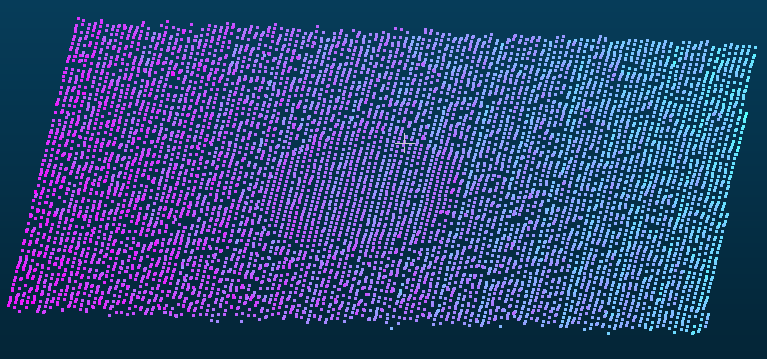
综合描述: 迅猛龙VR系列传感器是珩图科技自主研发的具有高性价比的大范围面扫描三维结构光传感器,VR系列传感器使用移相法结构光技术,配合内部搭载的Nvidia CUDA核心,采用硬件并行计算技术加速3D点云数据的输出,最高可实现3.3帧/秒的点云输出速度。
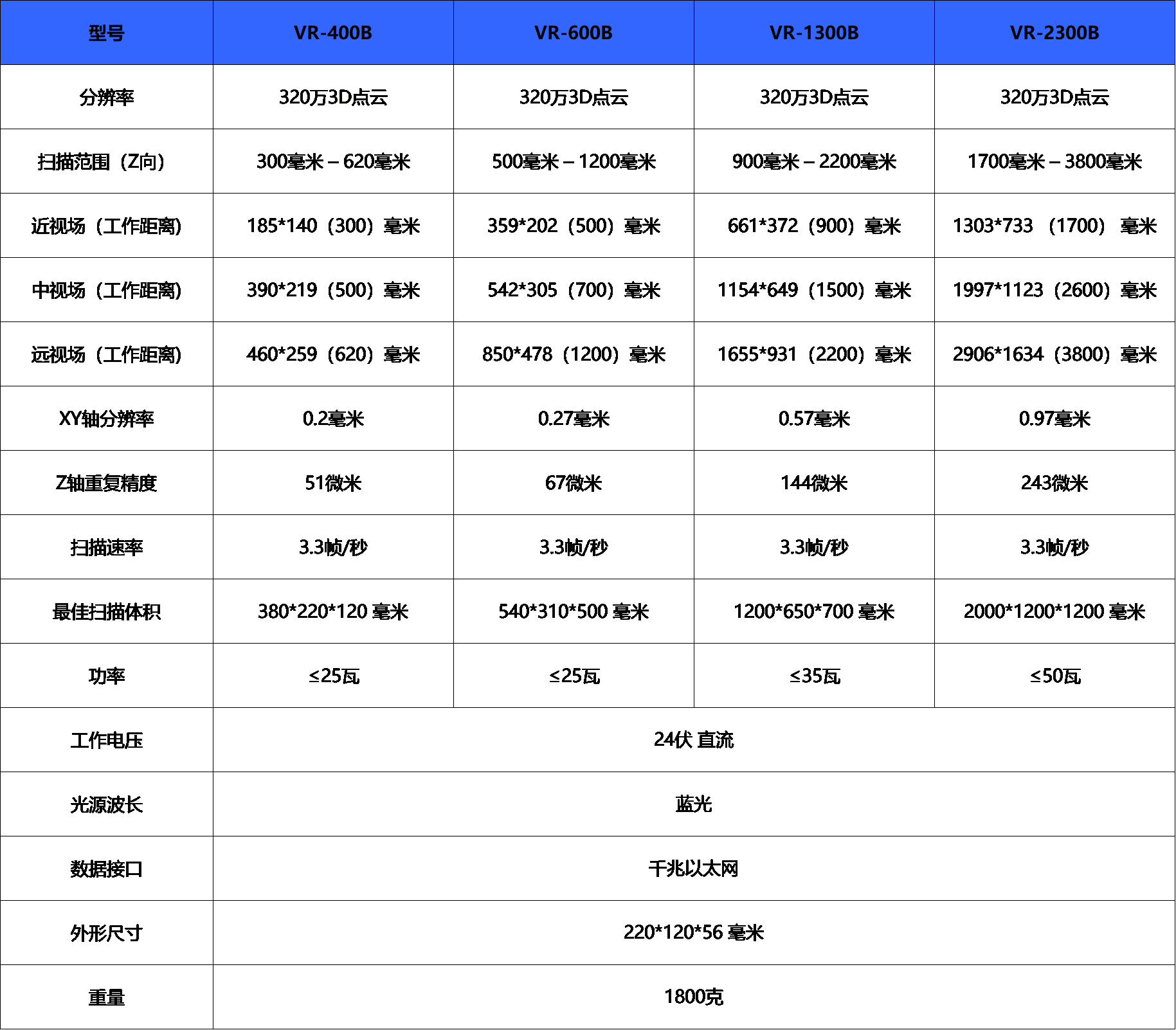
迅猛龙VR系列传感器的检测视野185mm-2906mm,检测范围覆盖了绝大部分的工业应用场景的需求视野,得益于使用了高亮度的DLP结构光投影技术,在非阳光直射的明亮环境下,传感器依旧拥有很好的抗光干扰的成像能力。
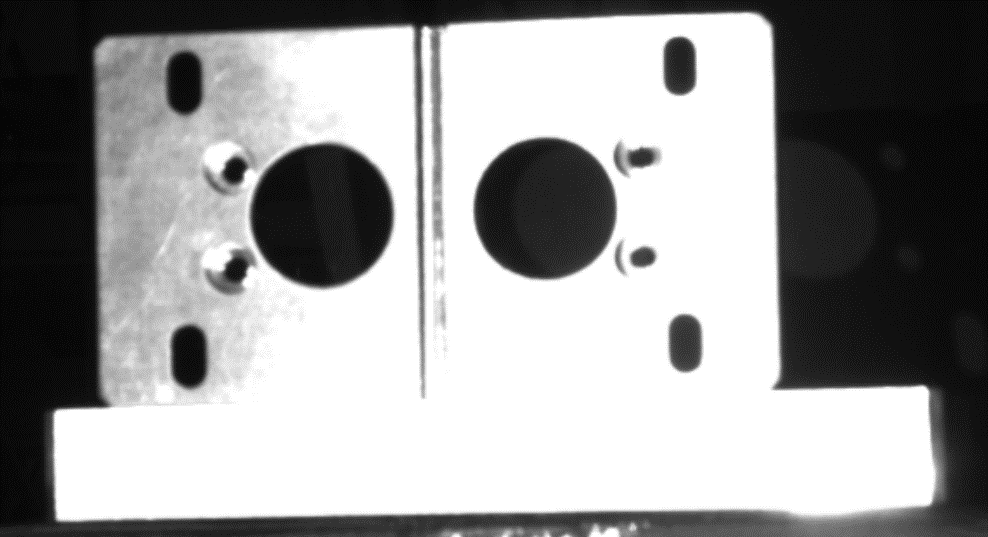
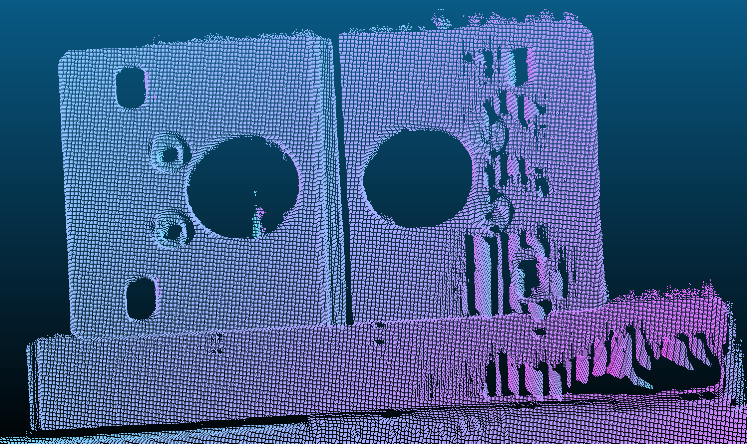
迅猛龙相机采用单相机单投影的方式实现三维成像,最高精度可达0.2mm。为获取高对比度和高反光的物体的精确三维表面轮廓,我们在计算点云时添加了图像增强算法,确保传感器对绝大部分表面材质的物体均能拥有完整、良好的成像效果。
迅猛龙相机的体积设计小巧,便于安装,配合其宽泛的检测视野,可轻松应用于引导定位、工业检测、拆垛码垛和无序抓取等应用场景。
主要性能指标: 图像分辨率:2048*1536(320万像素) 扫描速度:3.3fps 视野范围:185mm-2906mm
|
迅猛龙3D相机——珩图科技(上海)有限公司
| 材料来源:VSDC INNOVATORS AWARDS 2022 录入时间:2022/9/7 15:08:09 |











| 友情链接 |


一步步新技术 |

洁净室 |

激光世界 |

微波杂志 |

视觉系统设计 |

化合物半导体 |

工业AI |

半导体芯科技 |
首页 | 服务条款 | 隐私声明| 关于我们 | 加入我们 | 联络我们
Copyright© 2025: 《视觉系统设计》; All Rights Reserved.
 粤公网安备 44030402004702号 粤ICP备12025165号-6
粤公网安备 44030402004702号 粤ICP备12025165号-6
Copyright© 2025: 《视觉系统设计》; All Rights Reserved.