


应用背景
锂电池是一种高效、轻便和可重复充电的电池类型,常被应用于移动设备、电动车辆、储能系统等领域。但是,如果生产过程中出现了缺陷或损伤,这些电池可能会导致严重的安全问题。因此,为确保生产过程的质量控制和产品安全性,需要进行各种检测和测试,其中锂电池X-Ray检测是通过使用X射线和相关的成像技术来探测材料内部的结构和缺陷,它可以帮助发现许多常见的缺陷和问题,例如气体孔隙、金属碎片、粘接不良、异物等。这些问题可能会影响电池的性能和稳定性,并导致严重的安全问题。通常,在锂电池的生产过程中,需要进行两种类型的X-Ray检测。一种是对电池零部件(例如正极、负极、隔膜等)进行检测,以确保它们的结构和组装质量符合要求。另一种检测是对成品电池进行检测,以检查电池内部是否存在缺陷或异物。
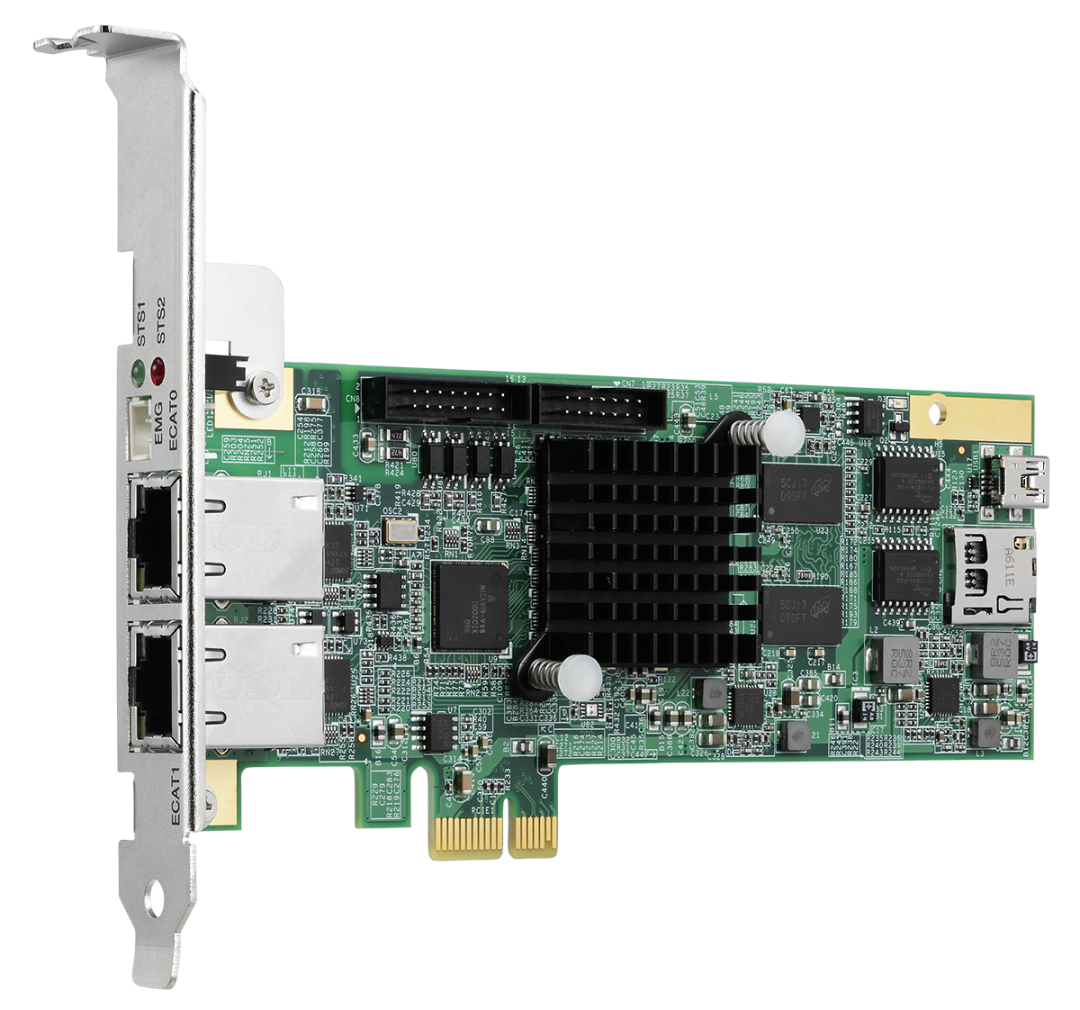
PCIe-833x EtherCAT运动控制卡介绍
凌华科技PCIe-833x是一款基于硬件的EtherCAT运动控制卡,能够同时支持多达64个同步轴和超过10,000 个I/O 点。PCIe-833x具有专用的隔离紧急停止输入(EMG) 和可配置的隔离高速数字输入,不仅具有通用传感器输入,而且具有高达1MHz 输入频率的脉冲输入。
在250μs 的最小通讯周期内提供最佳的抖动控制,优化半导体、电子制造等自动化应用领域的同步I/O 性能。
PCIe-833x产品特性
• 通过EtherCAT 可实现多达64 轴的运动控制和10,000 个I/O 点控制
• EtherCAT 控制周期高达250μs
• 兼容大多数EtherCAT从站
• 专用的紧急停止输入
• 板卡自带4通道隔离数字输入/4通道隔离数字输出
• 单通道脉冲输入
• 针对轨迹应用的点表功能
• 支持最高达16D直线插补,3D圆弧插补和3D螺旋插补
• 对于独立的应用,提供8个程序可下载功能
• 支持从站ID设置
锂电池X-Ray检测设备功能需求:
1)点位运动功能。
2)位置比较输出和动态添点功能,用于触发X-Ray射线检测仪根据程序设定的位置进行检测拍照。
PCIe-833x解决方案
1) 点位运动功能
APS_ptp
Syntax:
C/C++:
I32 APS_ptp( I32 Axis_ID, I32 Option, F64 Position, ASYNCALL *Wait);
Visual Basic: APS_ptp(ByVal Axis_ID As Long, ByVal Option As Long, ByVal Position As Double, Wait As ASYNCALL) As Long
2)位置比较输出和动态添点功能
位置比较输出和动态添点功能通过外接ECAT-TRG4 4通道高速位置比较和触发模块实现,ECAT-TRG4 是 EtherCAT从端模块,具有高速位置比较触发和编码器单个信号中继功能,该模块的规格如下,
• 4 通道点表触发 - 最大10 MHz带FIFO 255 点
• 4 通道线性触发 - 最大10MHz
• 4 通道位置锁存 - 最大3 MHz带 255 点
• 硬件紧急停止接口
• 通过主站最多支持 32 组龙门功能
• 轴参数的断电记忆
• 支持编码器信号中继功能
• 支持高级点表
需要用到的函数和语法如下,
APS_set_field_bus_trigger_param
Syntax:
C/C++:
I32 APS_set_field_bus_trigger_param( I32 Board_ID, I32 BUS_No, I32 MOD_No, I32 Param_No, I32 Param_Val );
Visual Basic:
APS_set_field_bus_trigger_param (ByVal Board_ID As Long, ByVal BUS_No As Long, ByVal MOD_No As Long, ByVal Param_No As Long, ByVal Param_Val As Long) As Long
APS_get_field_bus_trigger_param
Syntax:
C/C++:
I32 APS_get_field_bus_trigger_param( I32 Board_ID, I32 BUS_No, I32 MOD_No, I32 Param_No, I32 *Param_Val );
Visual Basic:
APS_get_field_bus_trigger_param(ByVal Board_ID As Long, ByVal BUS_No As Long, ByVal MOD_No As Long, ByVal Param_No As Long, Param_Val As Long) As Long
APS_set_field_bus_trigger_table
Syntax:
C/C++:
I32 APS_set_field_bus_trigger_table( I32 Board_ID, I32 BUS_No, I32 MOD_No, I32 TCmpCh, I32 *DataArr, I32 ArraySize );
Visual Basic:
APS_set_field_bus_trigger_table( ByVal Board_ID As Long, ByVal BUS_No As Long, ByVal MOD_No, ByVal TCmpCh As Long, DataArr As Long, ByVal ArraySize As Long) As Long
APS_get_field_bus_trigger_count
Syntax:
C/C++:
I32 APS_get_field_bus_trigger_count( I32 Board_ID, I32 BUS_No, I32 MOD_No, I32 TrgCh, I32 *TrgCnt );
Visual Basic:
APS_get_field_bus_trigger_count(ByVal Board_ID As Long, ByVal BUS_No As Long, ByVal MOD_No, ByVal TrgCh As Long, TrgCnt As Long) As Long
APS_get_field_bus_table_cmp_remain_count
Syntax:
C/C++:
I32 APS_get_field_bus_table_cmp_remain_count( I32 Board_ID, I32 BUS_No, I32 MOD_No, I32 TCmpCh, I32 *Cnt );
Visual Basic:
APS_get_field_bus_table_cmp_remain_count ( ByVal Board_ID As Long, ByVal BUS_No As Long, ByVal MOD_No, ByVal TCmpCh As Long, Cnt As Long ) As Long
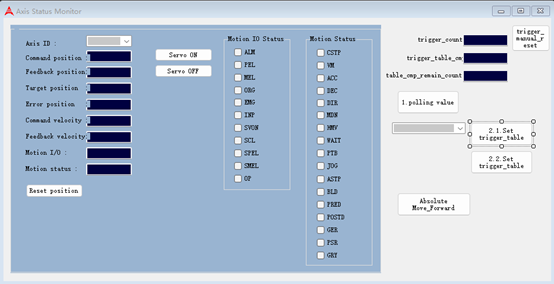
调试界面如下,可以在界面上看到目前已经完成触发的点位数量和仍然等待触发的点位数量。
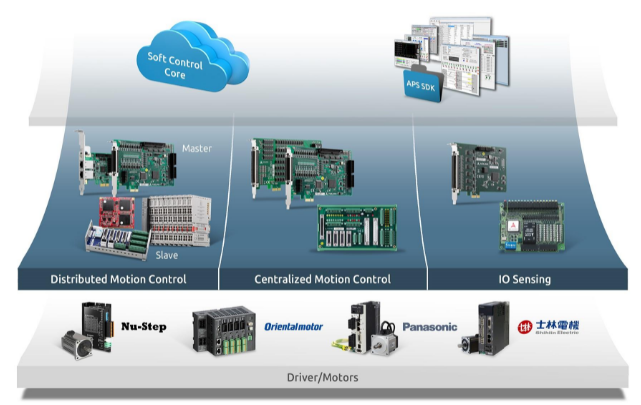
凌华科技EtherCAT一站式解决方案
图片
凌华科技为智能制造用户提供一站式解决方案,实现生产设备之间的互联互通,全面共享和交互内部数据,从而优化生产流程,更好地应对市场需求的变化。
用户可通过PC端的编程环境,在单个硬件平台上实现应用程序的集中控制,从而降低成本,提高系统可靠性和安全性。
文章来源:凌华科技
注:文章版权归原作者所有,本文仅供交流学习之用,如涉及版权等问题,请您告知,我们将及时处理。

















