


面对汽车行业的新变化、新趋势,如何满足多车型、高节拍、高质量的制造需求,同时保证安全生产,柔性且精益的全场景解决方案成了汽车行业变革的关键首选。

海康机器人基于全场景规划、柔性物流、精益管理、端到端服务四大关键能力,结合移动机器人与机器视觉软硬件产品,围绕汽车行业全场景生产打造了柔性且精益的解决方案,为汽车行业内物流与制造数智化转型注入新动力。
450+客户首选
打造柔性与精益生产的行业标杆
海康机器人基于移动机器人和机器视觉打造的全场景解决方案,深受汽车行业的青睐。目前,已助力吉利汽车、一汽丰田、一汽解放、一汽大众、华晨宝马、极氪等头部企业推进精益生产和柔性制造,打造了汽车行业生产的新标杆。

7大工艺段,60+细分场景
全流程覆盖柔性智造与精益生产
汽车制造业是离散工业中极具代表性和创新性的行业,涵盖了从零部件加工到整车装配的多个工艺流程,需要高度的技术积累和严格的质量控制。
基于移动机器人自主感知,结合视觉高效准确的读码、检测功能,面向汽车行业内物流与制造数智化转型,海康机器人提供全方位,一站式的解决方案。
接下来我们将深入探讨一些最具挑战性的解决方案。
01.冲压工艺段
如何提高检测精度并确保作业安全?
冲压生产线尾端传统叉车作业节奏快速,侧围外板平均1min进行一次交换,存在盲区,安全风险高,且冲压件质量检测效率低。
针对上述痛点,海康机器人打造了冲压件在线表面缺陷检测方案,采用海康定制光源+相机,结合深度学习算法,对冲压件进行在线质量检测。
冲压线尾自动装箱的方案,采用2D相机对零件进行视觉定位,引导机械臂进行零件下料抓取,通过大视野3D相机对料框进行定位,引导机械臂实现零件下线自动装箱。

同时,由AMR完成零件货架转运工作,通过智能调度系统的柔性调度,实现零件货架自动下线及上线补充,攻克了冲压线尾“缺陷检测+自动装箱+智慧物流”一体化的行业难题,打通了冲压线尾自动化、智能化的“最后一百米”。
02.焊装工艺段
如何保证高效柔性搬运?
焊装车间物料配送种类多、工位多,线边物料切换频繁,传统送料方式易导致产线缺料停线。
针对器具种类多,尺寸差异大的特点,海康机器人采用多款型号潜伏AMR相配合,打造了焊装大件上线方案,适配各种尺寸器具,支持侧围等超长、异形载具搬运。
智能仓储管理系统,通过多级缓存,自动空满交换,动态物料切换等方式,满足柔性生产需求。

如何打造高效精益生产?
传统焊装车间生产灵活性较低,无法适应高节拍的生产,检测精度和一致性有待提高。
海康机器人3D 视觉引导上料系统,采用自研高精度3D振镜立体相机DLS300P,实现快速工件精准定位,引导机械臂上料抓取。无需高精度库位固定机构,降低设计制造成本,可满足多车型兼容性需求,实现精益化、柔性化生产。
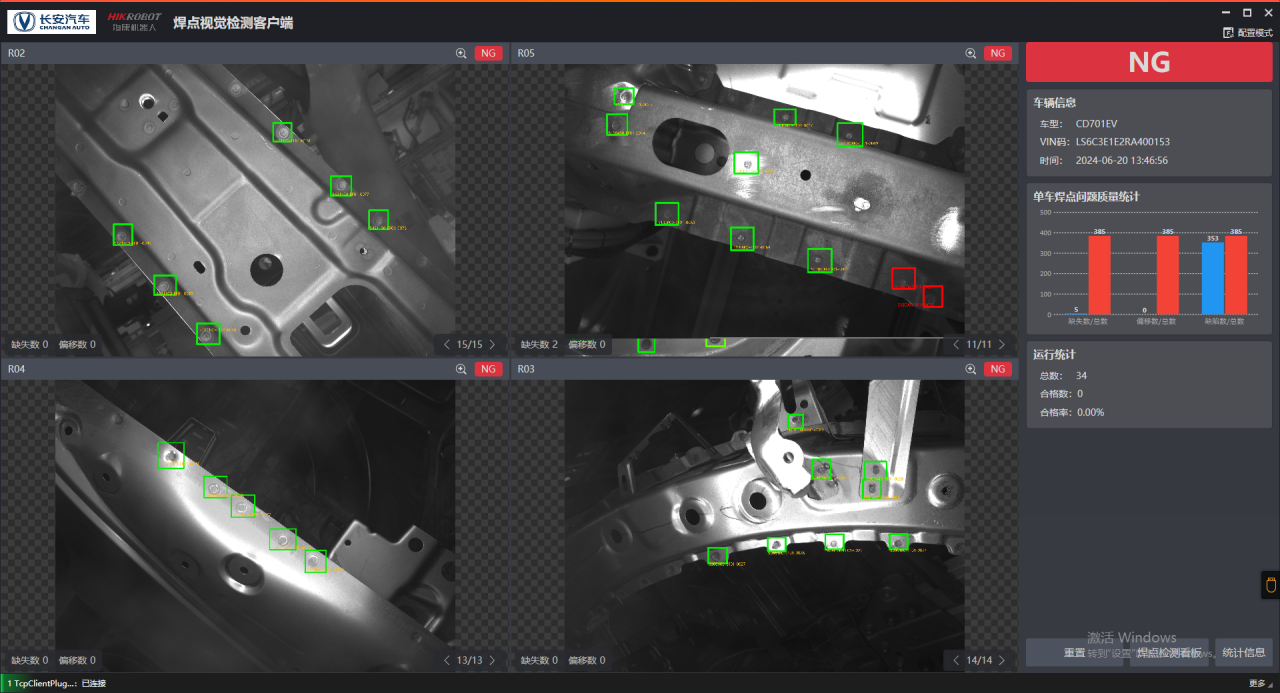
通过面阵相机+深度学习算法,对白车身以及相关焊接件进行焊点质量检测,完成焊点有无检测、焊点偏移检测、焊点缺陷检测,如飞溅、毛刺、边焊、重焊、焊穿等缺陷可高效精准的检测。
03.压铸工艺段
如何提高设备与工艺的兼容性,实现高精度对接?
压铸车间送线需要大量传统叉车转运、上料,且工作环境高温高压,不适合人员长期作业。
海康机器人依靠自身强大的客制化能力,提供了压铸车间整体解决方案,根据零件特点设计仿形工装AMR,支持机械臂直接将铸件放到AMR工装上,AMR将铸件送至检验工位进行检验,实现自动对接,无需人员介入。
同时,强大的导航定位算法保证AMR定位准确,满足了机械臂的高精度对接要求,提高了作业效率。

04.涂装工艺段
如何把控漆面检测质量,提高搬运效率?
在实际应用中,如划痕、气泡、针眼等漆面质量问题,会对汽车的防腐性能产生影响,影响汽车使用寿命,同时,存放注塑毛坯件和喷涂成品件的器具很大,转运器具强度大。
针对以上问题,海康机器人漆面缺陷检测系统基于相位偏折原理方法,结合先进的机器视觉与图像处理技术。
LCD及相机搭载在机械臂上对车进行快速扫描,通过光源系统的明暗条纹移动,捕捉多个摄像头下的反射条纹图案,结合图像处理方法判断缺陷,高效、准确、实时地检测出各类缺陷,同时完成缺陷的自动分类与测量。

采用潜伏AMR搬运齐套器具,AMR环线运行,依次停靠各工位,完成备料,考虑任务均衡,一次对接电梯,实现两个器具一起随电梯转运,电梯运载效率大大提高,满足现场使用要求。
软硬件结合 技术全栈自研
全品类,全系统集成,满足多元需求
海康机器人始终以硬件为基、软件为核驱动创新,坚持技术全域自研,解决方案全覆盖。
目前,在汽车行业的产品矩阵涵盖全品类AMR车型,及智能相机、智能读码器等多种类型视觉产品,结合自主研发的软件系统,如机器人调度系统(RCS)、智能仓储管理系统(iWMS)和视觉引导系统,为汽车行业打造覆盖企业全工艺、全场景解决方案。
转自:海康机器人Hikrobot
注:文章版权归原作者所有,本文仅供交流学习之用,如涉及版权等问题,请您告知,我们将及时处理。

















