


客户名称:上海ABB工程有限公司
上海ABB工程有限公司是ABB的重要本地企业之一,是ABB在华工业机器人及系统业务(离散自动化与运动控制)、仪器仪表(过程自动化)、变电站自动化系统(电力系统)和集成分析系统 (过程自动化)的主要生产工程基地。
一. 客户需求
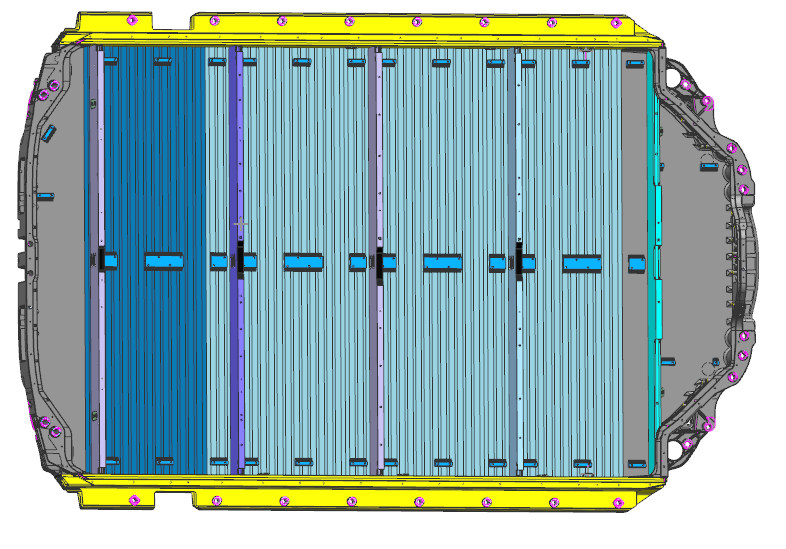
1、汽车零部件搬运,工件材料为铝型材、铸铝,搬运机器人从上料工位的料架中通过视觉定位拍摄工件销孔位置定位工件,将工件抓取出来,放入工作台加工
2、定位精度0.2mm
3、预留节拍3-5s
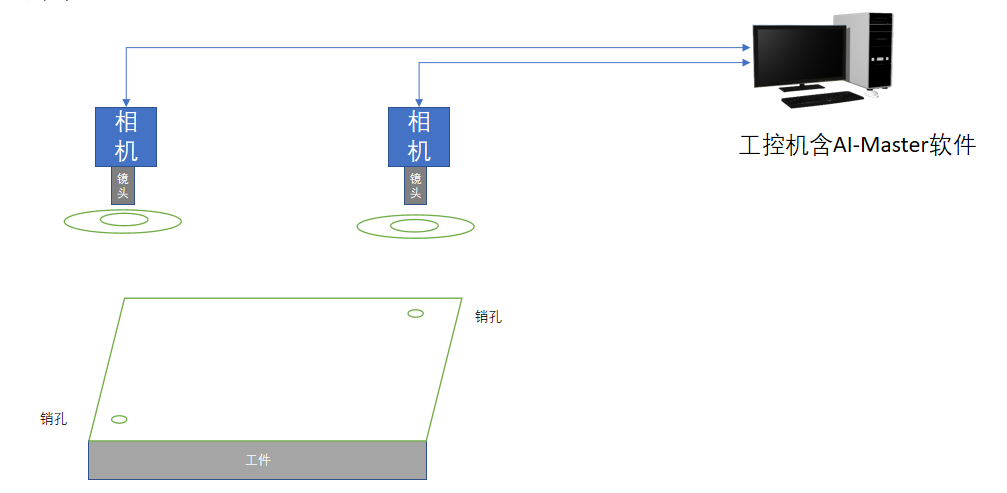
二. 硬件配置
项目难点:
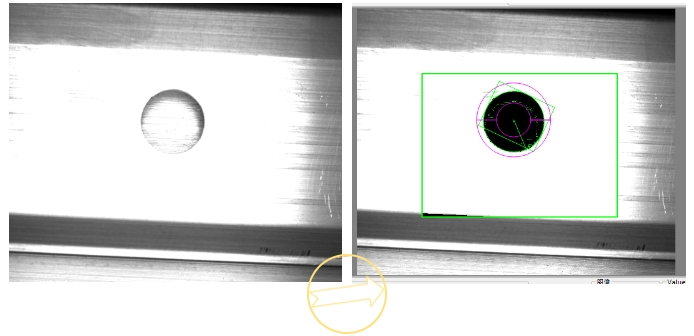
由于安装位置受限,所拍摄的位置孔为盲孔,即底层还有一层铝板,正面照射时,现场条件无法满足低角度打光,将孔整个拍摄出来,如图,利用算子将圆孔处理出来。
三、检测思路以及算子实现方式
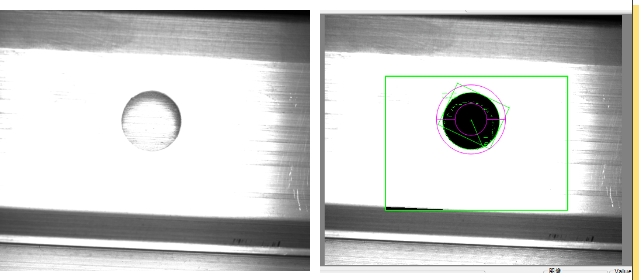
1、首先通过颗粒物检查算子,将盲孔找到,再利用找圆算子将盲孔形成的圆弧内部填充黑色形成黑色圆孔,利用拟合圆找出该圆孔中心。
2、利用两个相机分别拍摄工件两个销孔位置,来判断工件移动偏差以及角度,得到机器人需要修正的偏差值。
四、界面介绍

主界面:显示两个相机的显示画面,画面可设置大小和位置
运行界面:可实现程序的启停,手动操作,保存图片,制作模板,程序备份,程序恢复功能。

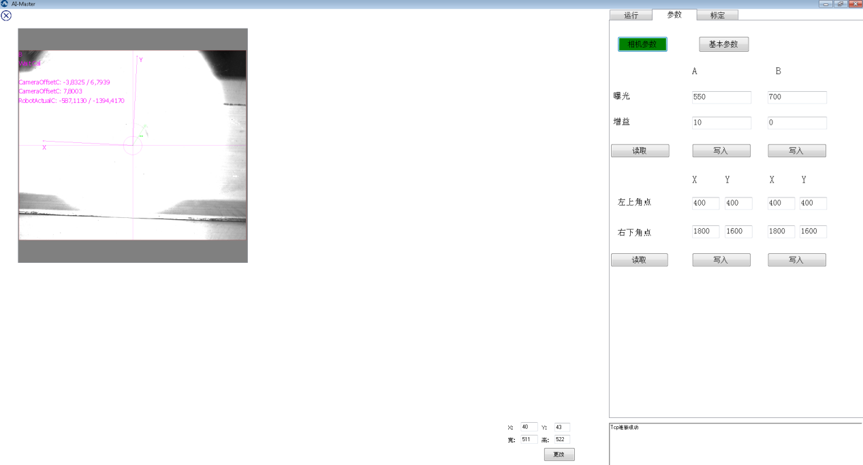
参数:参数页面包含相机ROI区域设置,曝光增益设置,以及程序内部可修的相关参设置
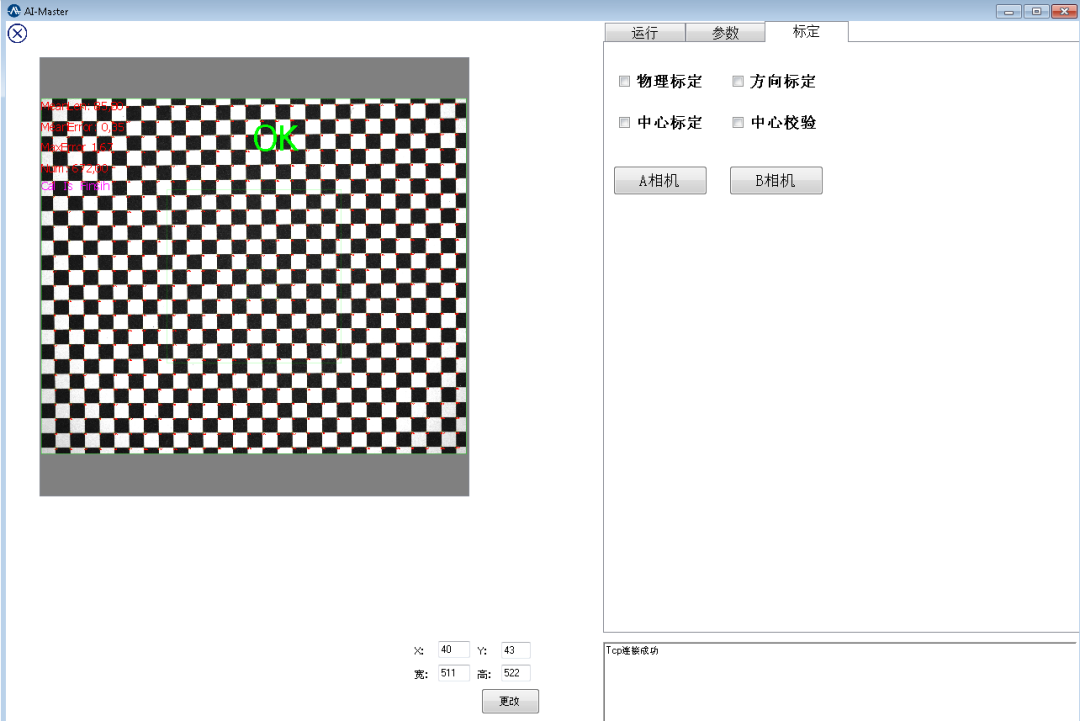
标定:标定页面分为物理标定、方向标定、中心标定以及中心校验功能同机器人进行自动标定,方便快捷,易于操作
来源:昂敏智能
注:文章版权归原作者所有,本文仅供交流学习之用,如涉及版权等问题,请您告知,我们将及时处理。

















