


项目背景
背景:
在电动汽车电池上下壳的生产过程中,需要使用移动机器人进行运输,当料车运行到计划点后,需要机械臂定位抓取,此时需要机器视觉来进行精定位,从而准确的抓取工件。
需求:
以工件销孔作为参照对其进行拍摄,并处理得出数据反馈给机械臂抓取。
难点:
1.获取清晰完整的销孔图像;2.获取所需的比例尺、方向等信息与机器人进行联动。
解决方案
方案:
先使用高精度标定板,以六点法、十五点法进行标定,再使用环形光源获取清晰的销孔,从而获取到图像信息并反馈给机器人。
软件:
AI-Master 机器视觉软件
硬件:
相机:海康相机
镜头:工业镜头
光源:环形光源
实施结果
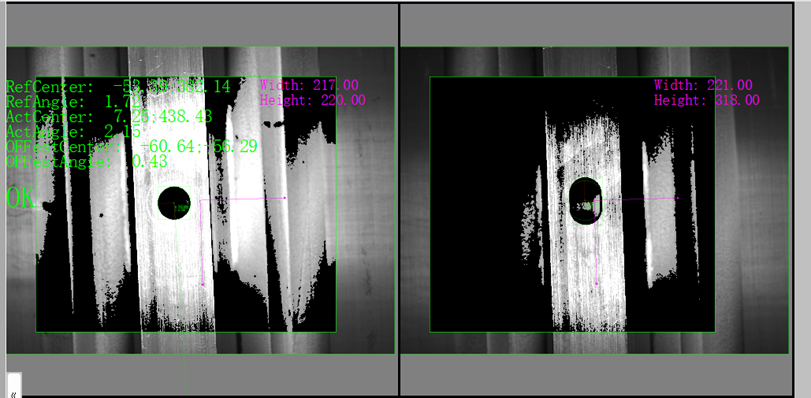
经过测试,此套设备稳定可靠,错误率低于千分之一,对于不同形态各个位置的工件都能进行准确的抓取。

软件界面:
方案优点
-
简单可靠,稳定性高
-
对于不同样式的工件都能适用
-
用于定位所需要获取的参数可以很方便的在软件上进行更改。
转自:昂敏智能
注:文章版权归原作者所有,本文仅供交流学习之用,如涉及版权等问题,请您告知,我们将及时处理。
















