


项目目标
3D视觉定位技术助力新能源汽车换电小车实现精准高效电池投放
-
配合新能源汽车公司实现换电柜中换电小车快速、精确、实效地抓取更换、放入填补目标换电车辆电池舱内的电池。
-
基于3D(结构光+双目摄像头)相机提供快速、有效、精准的3D视觉定位解决方案。
-
实现在户外环境下(提供具有可行性的外界光源遮挡条件),通过该3D视觉定位解决方案实现电池舱舱口、电池的3D精准定位。
功能需求
3D视觉定位实现新能源汽车换电小车精准抓取与投放电池
抓取电池阶段:在设备进入准备换电池视觉定位阶段时,通过安装在换电小车车体上的单个3D(结构光+双目摄像头)相机快速、有效、精准获取目标换电车辆待取电池的3D信息(包括电池前视面的X、Y、Z轴的坐标信息以及电池的R角,即绕Z轴角度),为执行机构给出准确的四轴位移量信息(X轴、Y轴、Z轴、R角),使换电小车能准确到达指定位置实现电池的抓取动作。当在取电池阶段电池舱在大地坐标系下发生偏移时(特指Z轴高度信息),3D相机能够实时反馈准确的输入参数进行实时调整换电小车姿态。
投放电池阶段:在设备进入准备放电池视觉定位阶段时,通过安装在换电小车车体上的单个3D(结构光+双目摄像头)相机快速、有效、精准获取目标换电车辆电池舱舱口的3D信息(包括电池舱舱口前视面的X、Y、Z轴的坐标信息以及电池舱的R角),为执行机构输入准确的四轴位移量信息(X轴、Y轴、Z轴、R角),待换电小车准确到达指定位置实现电池的投放动作。当在投放电池阶段电池舱在大地坐标系下发生偏移时(特指Z轴高度信息),3D相机能够实时反馈准确的输入参数进行实时调整换电小车姿态。
如果由于位置、光线或其他问题,相机视野范围内无法成功定位,则给出引导建议及相关位移动参数信息。
其他需求
户外环境下3D视觉定位保障换电小车精准操作
-
是否支持在户外环境正常工作,实现功能。(相机及检测目标【电池及电池舱】应避免受到强光照射影响,黑色物体会有点云缺失)
-
该款3D相机的工作环境(适应的湿度、温度、光照度等外界环境)。
技术约束
提供视觉算法库及远程调试支持,助力新能源汽车换电小车精准操作
-
需要有现成或一起开发的视觉算法动态库,或者框架。
-
算法调试工作支持提远程指导服务。
技术路线
3D视觉技术精准定位新能源汽车换电小车电池抓取与投放
抓取电池:
1.如图1所示红框,DL模型训练定位电池前视面中间插头轮廓及插头外界矩形外框轮廓。
2.满足步骤1的定位判断后模型训练定位电池前视面完整轮廓平面,由此平面处理点云信息输出待抓取电池的X轴、Y轴、Z轴、R角(即绕Z轴运动角Yaw),四轴执行机构同时执行相关位移量到达可准确抓取位置。
3.在抓取过程中,车辆电池舱由于电池被抓取后发生高度变化,按照经验法执行相关运动进行高度调整(能否通过算法进行定位实现)。
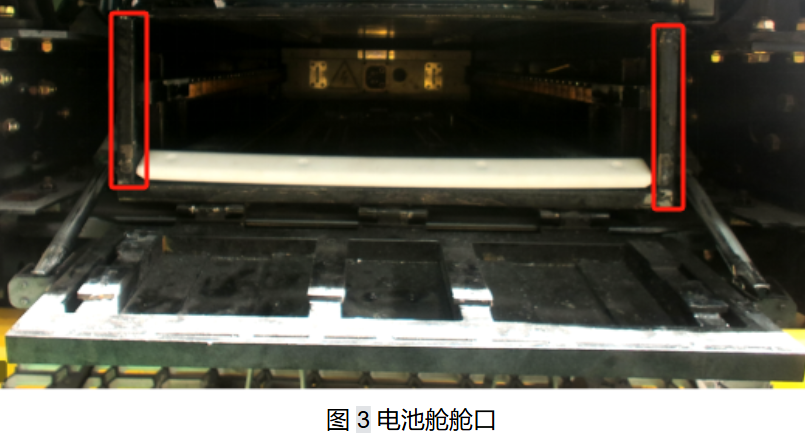
投放电池(电池舱无拉篮结构):
如图二所示,识别电池舱舱口左右两侧白色区域平面。由此平面处理点云信息(并验证实际物理 位置,确定是仓位),输出电池舱的X轴、Y轴、Z轴,执行机构执行Z轴相关位移量到达实际高度位置。
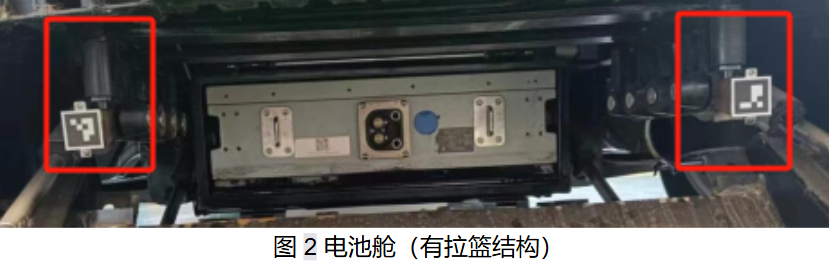
投放电池(电池舱有拉篮结构):
新设计的电池舱结构(带拉篮结构且舱口后移300mm)如图三所示。输出电池舱的X轴、Y轴、Z轴,执行机构执行Z轴相关位移量到达实际度。
转自:微链机器人视觉研究
注:文章版权归原作者所有,本文内容、图片、视频来自网络,仅供交流学习之用,如涉及版权等问题,请您告知,我们将及时处理。
















