


检测需求
机械臂打磨与视觉检测确保压铸件精度
压铸件固定在磨具上、机械臂会将压铸件先打磨一遍、打磨完之后机械手带着相机去打磨位置位置拍照,查看是不是都打磨平。
-
种类:两种、不经常换型
-
每种件打磨位置一致、故拍照位置一致
-
标准:分型线残留<0.5mm以下的为合格
-
节拍:200S(机器人打磨+运行轨迹)
解决方案
FANUC机器人集成3D视觉检测与智能打磨的压铸件自动化处理系统
-
FANUC机器人将压铸件打磨。
-
打磨后压铸件进去检测工作站。
-
3D相机对压铸件各检测位置拍照。此步机器人携带3D相机移动拍照、还是相机固定、机器人携带压铸件移动后续看工艺设计待定。
-
视觉检测软件检测、检测到缺陷<0.5MM、需将缺陷位置、高度等信息传出。
-
FANUC机器人接收到视觉输出的缺陷位置后、根据位置调出相应的打磨轨迹、在根据视觉输出的缺陷高度信息、调整对应的机器人打磨点位的高度。
-
复检该位置的打磨情况、并输出是否OK等信息。
压铸件细节
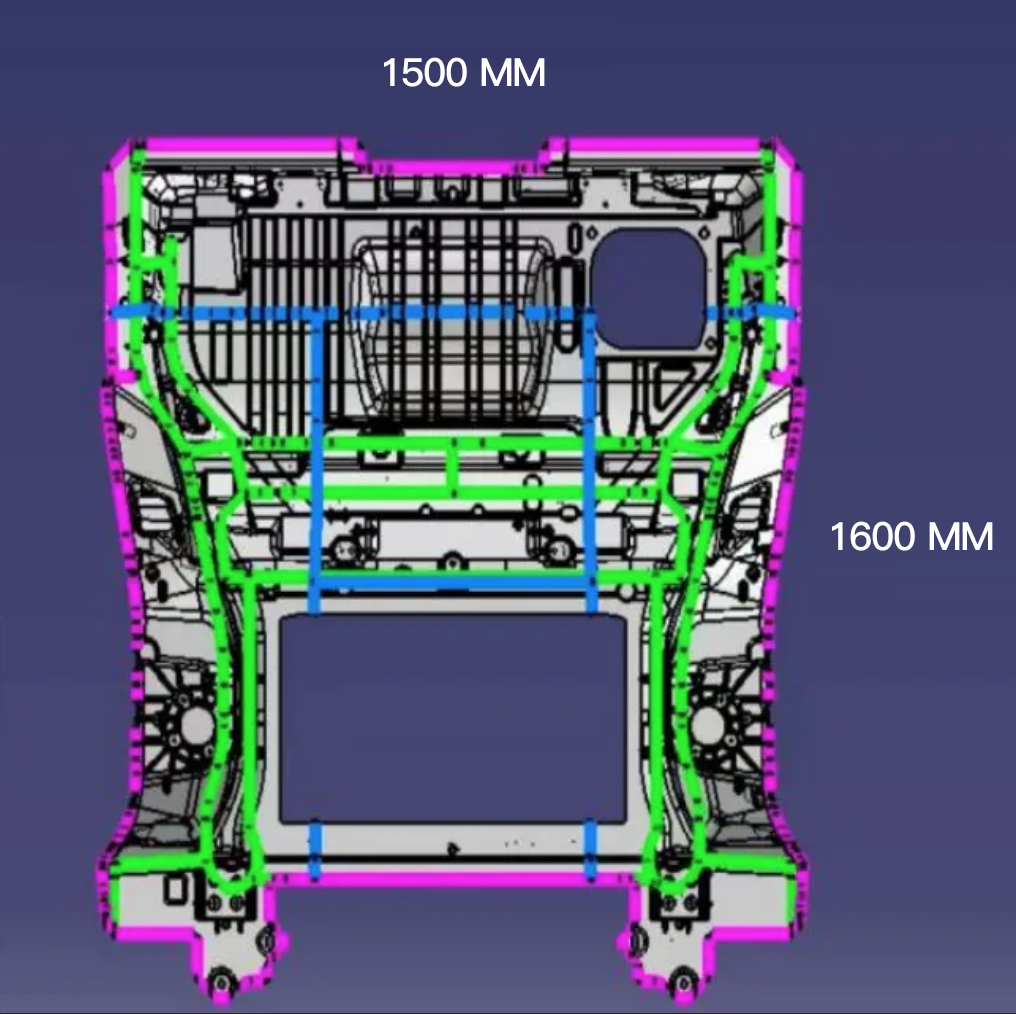
压铸件尺寸:1500*1600MM
右图中:蓝色、绿色、紫色线条为机器人打磨轨迹
下图中:黄色、红色点为机器人打磨位置

检测缺陷展示

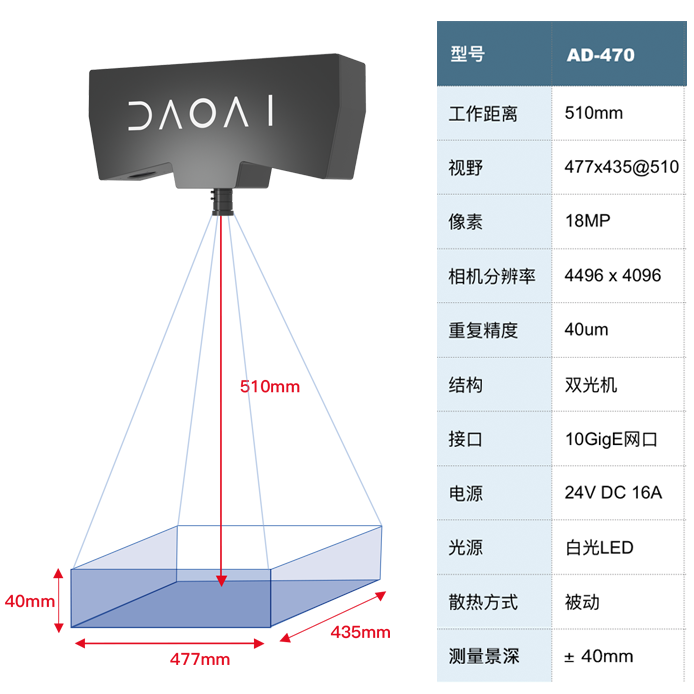
3D相机参数

转自:微链机器人视觉研究
注:文章版权归原作者所有,本文内容、图片、视频来自网络,仅供交流学习之用,如涉及版权等问题,请您告知,我们将及时处理。
















