
Page 36 - VSDC_MayJun2018_eMag
P. 36
应用与解决方案 Applications & Solutions
其中距离立体相机系统较近的物体比
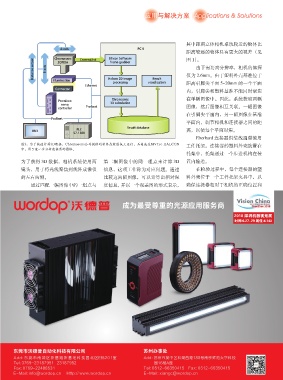
A-axis PC 1
距离较远的物体具有更大的视差(见
Silicon Software
Chromasens
CameraLink
图 1)。
Distance sensor B-axis 3DPIXA frame grabber 仅为 2.6mm。由于塑料外壳基准位于
由于需要高分辨率,相机的焦深
Result
Illumination
processing
Ethernet Halcon 2D image visualization 距离引脚尖平面 5~20mm 的一个平面
Connector
内,引脚尖和塑料基准不能同时聚焦
Promicon Chromasens 在单幅图像中。因此,系统获取两幅
servo 3D calculation
controller Pronet 图像,然后图像相互关联。一幅图像
在引脚尖平面内,另一幅图像在基准
Pronet
平面内,调节相机和连接器之间的距
HMI PLC Result database 离,以使每个平面对焦。
S7-1500
Eberhard 连接器组装线通常使用
图3:为了快速计算3D数据,Chromasens公司提供的软件在绘图板上运行,并集成在MVTec HALCON
工件托架。连接器的塑料外壳放置在
中,用于进一步分析连接器的图像。
托架中,托架通过一个步进机构在装
为了获得 3D 数据,相机系统使用两 第二幅图像中的同一组点来计算 3D 置内输送。
镜头,用于将光线聚焦到线阵成像仪 信息,这项工作称为对应问题。通过 在检验过程中,每个连接器的塑
的左右两侧。 比较这两幅图像,可以计算出相对深 料外壳位于一个工件托架夹具中,以
通过匹配一幅图像中的一组点与 度信息,并以一个视差图的形式表示, 确保连接器相对于相机的正确位置和
2018 深圳机器视觉展
时间:6.27-29 展位:4.143
视觉系统设计 Vision Systems Design China May/Jun 2018 33